Olivia Richards, BS1, Elan Ahronovich, BS1, Neel Shihora, 1, Ahmet Yildiz, BSc1, Jumanh Atoum, MSc1, Jie Ying Wu, BSc, MSc, PhD1, Keith L. Obstein, MD, MPH, FACG2, Nabil Simaan, PhD1 1Vanderbilt University, Nashville, TN; 2Vanderbilt University Medical Center, Nashville, TN
Introduction:
Visual demonstration and verbal direction are instructional formats for training endoscopists. These methods are inefficient in developing trainees' muscle memory or technical competence--as skill acquisition comes through sensory exposure and hands-on practice. Accurate assessment of technical skill is a first step toward overcoming this challenge. Our team has designed a novel robotic system for objective evaluation and mentoring--facilitating quantitative and haptic feedback. The initial preliminary performance of the system is unknown.
Methods:
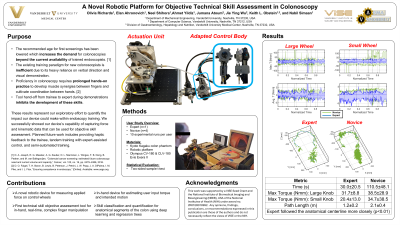
Device: Our robotic system works in parallel with a standard colonoscope, consisting of a table-side actuation unit and an adaptor mounted to the endoscope handle. The unit has two motors, for controlling and sensing the angulation knobs, with connected wires. The adaptor guides wire ropes around a custom knob cover allowing full independent motor control of each knob.
Study: A colon phantom in standard configuration was used. Four EM sensors were attached to the endoscope to track its position and location. 1 expert and 4 novices each completed 10 colonoscopies on the phantom. Kinematic data was collected from the robotic control system and the EM sensors. The Euclidean distance between the user's path and the colon's anatomical centerline was calculated; comparisons between participant trials was performed using two-sample t-test.
Results:
Experts completed colon navigation in 30.0±20.5 s while novices required 110.5±48.1 s. Novice maximum applied torque was 38.5±28.9 and 34.7±38.5 Nmm (large and small knob) respectively, while the experts was 31.7±8.8 and 20.4±13.0 Nmm respectively. Expert position data followed the colons center line more closely than novices (p< 0.01). Novices needed to retract the colonoscope more frequently resulting in a path length of 2.1±0.7 m, whereas expert path length was 1.2±0.2 m.
Discussion:
While all endoscopists completed the colonoscopy, data from our novel platform showed an objective quantitative difference between expert and novices [Fig 1]. The robotic platform helped to ensure kinematic data and feedback were obtained. There was clear variance between expert and novice for knob torque and endoscope tip position. Returning this data to the trainee using robotic haptic guidance can potentially facilitate enhanced technical skill mentoring. A study of GI fellows and attendings is in process.
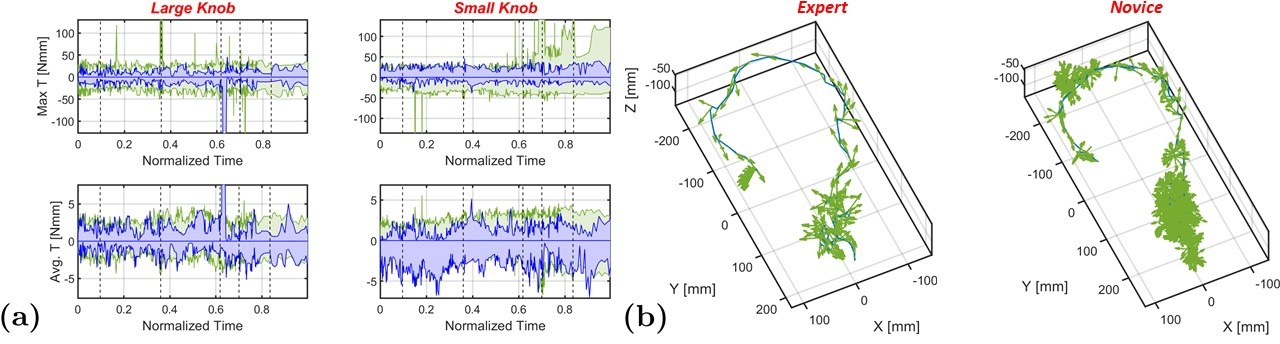
Figure: a) The average and maximum torque applied to control knobs during experiments. The torque applied to both large and small knobs is shown. Expert data is represented in blue and novice in green. b) An example of the executed path and trajectory are shown for the expert (left) and a novice (right) user. Local tangents indicating tip trajectory are shown with a green arrow every 2 data points and the path is represented with a blue line.
Disclosures:
Olivia Richards indicated no relevant financial relationships.
Elan Ahronovich indicated no relevant financial relationships.
Neel Shihora indicated no relevant financial relationships.
Ahmet Yildiz indicated no relevant financial relationships.
Jumanh Atoum indicated no relevant financial relationships.
Jie Ying Wu indicated no relevant financial relationships.
Nabil Simaan indicated no relevant financial relationships.
Olivia Richards, BS1, Elan Ahronovich, BS1, Neel Shihora, 1, Ahmet Yildiz, BSc1, Jumanh Atoum, MSc1, Jie Ying Wu, BSc, MSc, PhD1, Keith L. Obstein, MD, MPH, FACG2, Nabil Simaan, PhD1. P0682 - A Novel Robotic Platform for Objective Technical Skill Assessment in Colonoscopy, ACG 2024 Annual Scientific Meeting Abstracts. Philadelphia, PA: American College of Gastroenterology.